
Robots Development Time Line
|
|
|
|
|
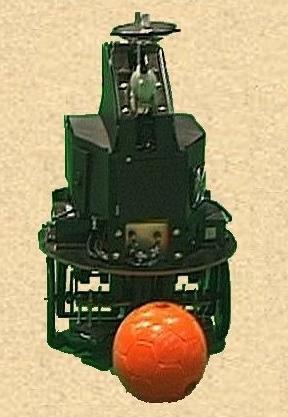
I With a renew team (new members), and some improvements in hardware and software. The main concern was increase the reliability of the robots. Other improvements is the remodelling of game strategy. Photographs:Team. Participations: Dutch Open 2006(2nd place), Robótica 2006 (1st place), Robocup 2006 (5th place) Robot Description: TDP-2006 Research details: see articles on R&D Link Improvements from previous version: cpu boards, upway kicker, relative movement using dynamic controller, absolute localization system
|
|
|
|
|
|
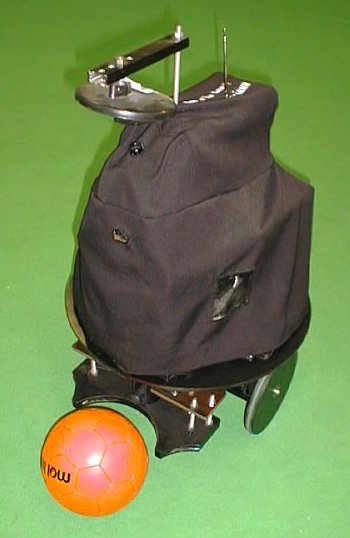
Robots had been submitted to a deep remodelling. The alterations most significant had been the exchange of engines and the implementation of a i2c net for communication between the differents devices. The robots had also used for the first time this new appearance. I |
|
|
|
|
|
We make some changes in the structural level. Software also suffered changes.It was improved the vision system, new mirrors and a new setting system. We used a new CPU compact boards.
|
|
|
|
|
|
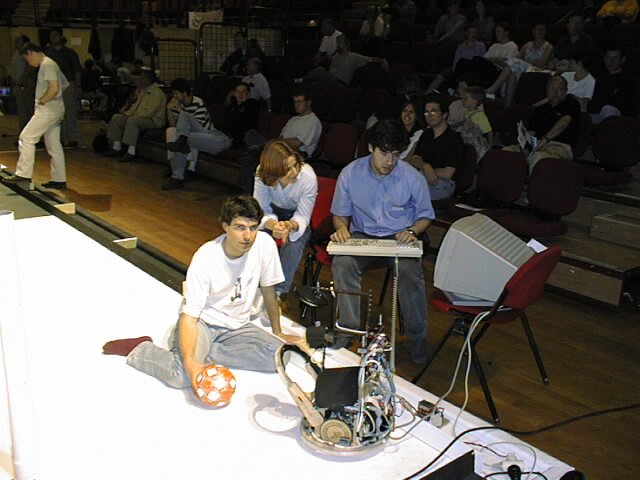
In Setember 2002 a group of 5 students and one mechanical leaded by Prof. Fernando Ribeiro started making a new gereration robotic football team. This new generation had with main objective the participation in Robocup 2003 in Italy, to which got magnificent 5º place. Photographs:Team. Participations: German Open 2003, Robotica 2003, Robocup 2003 Robot Description: Research details: see articles on R&D Link Let's look at the trailer (47.0Mb) |
|
|
|
|
|
Four people only continued developing these robots, and participated on the EUropean RoboCup version in the Netherlands. At the end of the year, we organised the first robocup rules National competition in Guimarães,Portugal. With lots of public attending the event was a success. Photographs:Team. Participations: EuRoboCup'2000 (Amsterdam, Holand), First National competition with the RoboCup rules (Guimarães, Portugal), Robot Description Research details: see articles on R&D Link Improvements from previous version: Video emmitters on the robots, electrical kicker, flexible colour calibration, wireless network board. |
|
|
|
|
|
In continuous research and development, the team is
preparing to attend the RoboCup'2001 held in Seattle. The sponsors were
contacted and the budget was achieved. The robots were again improved with 3
students and 2 staff. In order to prepare this participation the team already
participated in another robocup rules National competition held in Porto. Photographs:Team, Participations: RoboCup'2001 (Seattle, USA), Second National competition with the RoboCup rules (Porto, Portugal), Robot Description Research details: see articles on R&D Link Improvements from previous version: Completly new platform, two cameras per robot, Stronger kicker, new colour calibration technique (faster and more reliable), cooperation between robots. Others (IMPORTANT): |
|
|
|
|
|
Four people only continued developing these robots, and participated on the EUropean RoboCup version in the Netherlands. At the end of the year, we organised the first robocup rules National competition in Guimarães,Portugal. With lots of public attending the event was a success. Photographs:Team. Participations: EuRoboCup'2000 (Amsterdam, Holand), First National competition with the RoboCup rules (Guimarães, Portugal), Robot Description Research details: see articles on R&D Link Improvements from previous version: Video emmitters on the robots, electrical kicker, flexible colour calibration, wireless network board. |
|
|
|
|
|
With more or less the same team of humans and Another
6 months of work, these robots were improved. This year the participation were
on FICT again and for the first time ROoboCup'99 in Stockholm. The presence
there was very important to acquire know-how. Photographs:Team,
field, Supporters Participations: RoboCup'99 (Stockholm,
Sweden), FICT'99
(Bourges, France), DEMO
in Seia (Portugal), DEMO in Lisbon
(Portugal). Robot Description Research details: see articles on R&D Link Improvements from previous version: Mechanics improved, new control software, new routines for image processing. |
|
|
|
|
|
In January 1998 a group of 3 students leaded by Prof.
Fernando Ribeiro started making a robotic football team as a final undergraduate
project. The project consisted on three very simple mobile autonomous robots,
which play with the help of a ball handle. They participated on the FICT
(Festival Internacional de Science et Technology) in Bourges, France, and got
second place. Photographs: Team, field, Supporters Participations: FICT'98 (Bourges, France)
Robot Description Research details: see articles on R&D Link Improvements from previous version: Robos built from scratch, and everything was developed (mechanics, electronics, software, etc). The drivers for the video camera and the control software was new. |




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![]()
Last updated on 29-June-2006, by Fernando Oliveira & Pedro Silva