 |
PROJECTOS
Robôs do Grupo |
|
PROJECTOS
Robôs do Grupo |
|
|

|
|
|
|

|
|
|
Robô de pernas Lillybelle 1999
|
|
Robô de pernas Lillybelle 2000
|

|
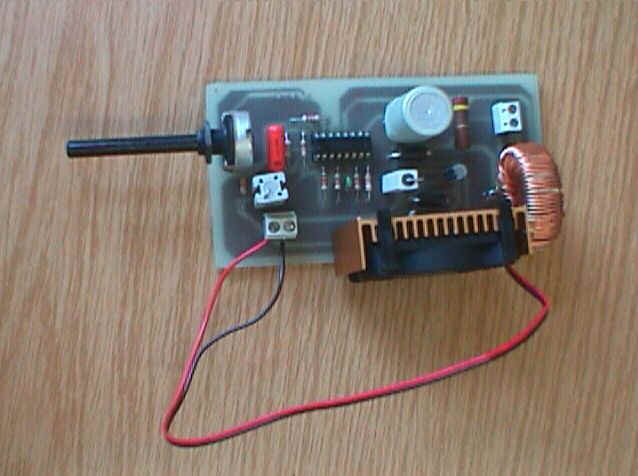
Controlador de Velocidade para Rádio-modelismo
|
|
|

|
|
|
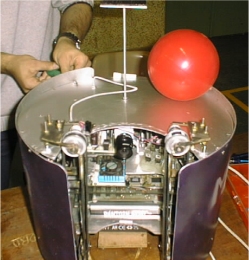
General Z.P.- Robot Móvel Autónomo 99
|
|
Criação de Página Html que Controle Robô com Câmara 99
|
|
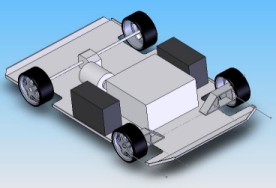
Carro Telecomandado com Visão 99
|
|
Carregador Rápido de Baterias NiCd
|
|
|

|
Variador de Velocidade de Motor de Indução Monofásico 99
|

|
|

|
|